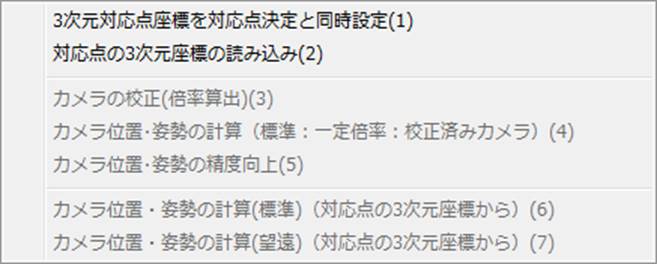
カメラ位置・姿勢の計算(手間がかかる新方式)
|
チェック |
対応点決定時にその対応点の3次元座標も同時に設定する場合にチェックが付きます。 |
|
使用可能状態 |
常時 |
|
説明 |
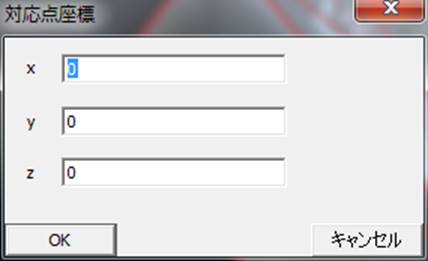
対応点決定時にその対応点の3次元座標も同時に設定するか否かを変更します。また、チェックが付いている場合は3次元の対応点の座標を黄色で写真上に表示します。カメラの校正またはカメラ位置姿勢の計算結果がある場合は、入力した対応点の3次元座標を写真に写る個所に黄色い点を表示します。 対応点決定時にその対応点の3次元座標も同時に設定する場合には、対応点決定時に以下のダイアログが表示されます。
OKボタンで入力した座標が対応点に設定されます。キャンセルを押すと既存の対応点の3次元座標が削除されます。 |
|
備考 |
対応点の3次元座標は「カメラの校正」「カメラ位置・姿勢の計算(対応点の3次元座標から)」で使用します。 |
(2) 対応点の3次元座標の読み込み
|
チェック |
未使用 |
|
使用可能状態 |
常時 |
|
説明 |
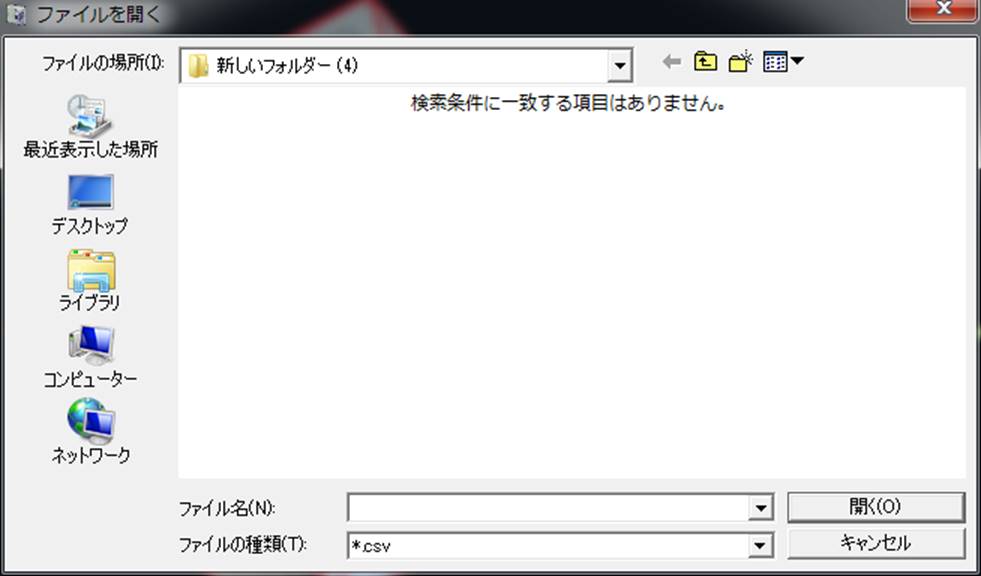
本メニューはCSVファイルから対応点の3次元座標を読み込みます。 本メニューを実行すると以下のダイアログが表示されます。CSV形式の対応点の3次元座標が記述されているファイルを選択します。
|
|
備考 |
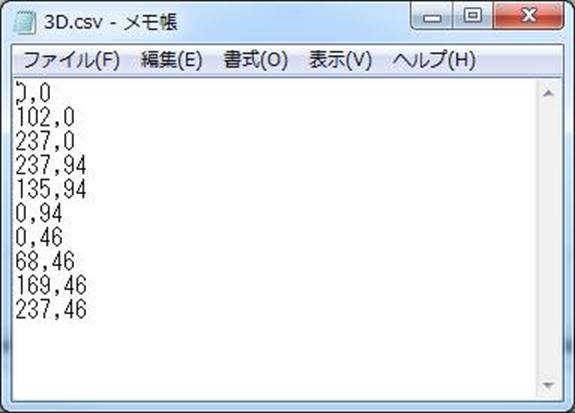
CSV形式はComma-Separated
Valuesと言い、以下のようにカンマで値を区切ったファイル形式です。CSV形式の対応点の3次元座標が記述されたファイルとは以下のようなものです。1行にX,Y、Zで記述します。先頭行が最初の対応点です。座標原点は対応点が載っている平面上のどこに置いても構いませんが、対応点の近くの方が良いです。以下の例では最初の対応点の座標を座標原点としています。Zは省略可能です。Zを省略した場合はZ=0と見なします。1行に何も書かれない場合や不正なフォーマットの場合、その行に対応する対応点には3次元座標を設定しません。
|
(3) カメラの校正(倍率算出)
|
チェック |
カメラの校正の計算結果が存在するときにチェックが付きます。 |
|
使用可能状態 |
以下の条件を全て満たしているとき。 (1) 写真を3枚以上読み込んでいる。 (2) 対応点が10個以上設定されている。 (3) 全ての対応点は全ての写真に入力されていて、BまたはC属性である。 |
|
説明 |
本メニューはカメラの校正(倍率算出)を行い、結果をCSV形式のファイルに出力します。メニューを起動するとカメラの校正を計算し以下のダイアログが表示されます。このダイアログでカメラの校正結果を保存するファイルを指定します。
|
|
備考 |
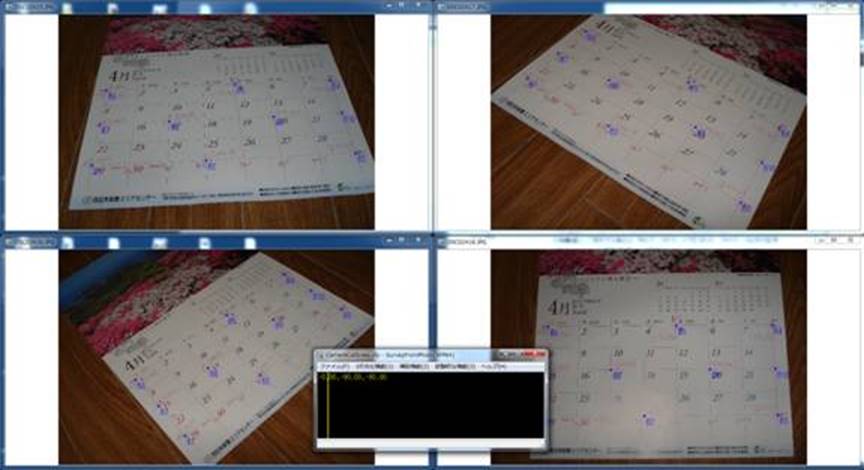
本メニューを実行するには平面上に10個以上対応点がある写真を3枚以上必要です。さらに対応点には対応点の3次元座標が必要です。この対応点の座標はZ=0でなければいけません。 カメラの校正(倍率算出)の計算結果は「カメラ(構成済み)位置・姿勢の計算」で使用します。 (1) 予め下のような写真を用意し対応点は全ての写真で写真上の対応点を入力します。条件は10個以上の対応点が平面に乗っていることです。下の例では古いカレンダーのマス目に対応点を入力しています。
(2) 対応点の設定時に「3次元対応点座標を対応点決定と同時設定」にしておいて3次元座標を設定するか、「対応点の3次元座標の読み込み」で対応点の3次元座標を読み込み設定してください。 |
(4) カメラ位置・姿勢の計算(標準:一定倍率:校正済みカメラ)
|
チェック |
カメラ位置・姿勢の計算(標準:一定倍率:校正済みカメラ)の計算結果がある場合にチェックが付きます。 |
|
使用可能状態 |
以下の全ての条件を満たしていること ① 写真を2枚以上読み込んでいる。 ② 全ての写真の画素数が一致していること。 ③ 全ての写真に対応点が4個以上あること。 ④ 共通の対応点が10個以上ある写真のペアがあること。 |
|
説明 |
カメラの校正結果を読み込み、カメラの位置姿勢を計算します。 以下のダイアログが表示されます。カメラらの校正結果が記述されているファイルを選択します。
|
|
備考 |
カメラの校正(倍率)が既に分かっているものとして、そのデータを読み込み、カメラ位置・姿勢を計算します。 |
(5) カメラ位置・姿勢の精度向上
|
チェック |
未使用 |
|
使用可能状態 |
カメラ位置・姿勢の計算(標準:一定倍率:校正済みカメラ)の計算結果がある場合 |
|
説明 |
カメラ位置・姿勢の計算(標準:一定倍率:校正済みカメラ)の計算結果がある場合の計算結果を向上します。 |
|
備考 |
カメラの校正(倍率)が既に分かっているものとして、カメラ位置・姿勢を計算します。 |
(6) カメラ位置・姿勢の計算(標準)(対応点の3次元座標から)
|
チェック |
「カメラ位置・姿勢の計算(対応点の3次元座標から)」の計算結果がある場合にチェックが付きます。 |
|
使用可能状態 |
以下の全ての条件を満たしていること ①
写真を2枚以上読み込んでいる。 ②
1枚の写真に3次元座標が設定した対応点が10個以上設定されている。先の条件を満たす写真が2枚以上ある。 |
|
説明 |
少数の対応点に3次元の座標を設定しておき、その3次元座標を元にカメラ位置・姿勢を計算します。カメラ位置・姿勢を計算後、対応点の3次元座標を算出します。 |
|
備考 |
対応点の設定時に「3次元対応点座標を対応点決定と同時設定」にしておいて3次元座標を設定するか、「対応点の3次元座標の読み込み」で対応点の3次元座標を読み込み設定してください。 |
(7) カメラ位置・姿勢の計算(望遠)(対応点の3次元座標から)
|
チェック |
「カメラ位置・姿勢の計算(対応点の3次元座標から)」の計算結果がある場合にチェックが付きます。 |
|
使用可能状態 |
以下の全ての条件を満たしていること ①
写真を2枚以上読み込んでいる。 ②
1枚の写真に3次元座標が設定した対応点が10個以上設定されている。先の条件を満たす写真が2枚以上ある。 |
|
説明 |
少数の対応点に3次元の座標を設定しておき、その3次元座標を元にカメラ位置・姿勢を計算します。カメラ位置・姿勢を計算後、対応点の3次元座標を算出します。 |
|
備考 |
対応点の設定時に「3次元対応点座標を対応点決定と同時設定」にしておいて3次元座標を設定するか、「対応点の3次元座標の読み込み」で対応点の3次元座標を読み込み設定してください。 |