������@
�͂��߂Ɏ��s���i�ʐ^�RD�\�t�g�j�������i��S���j�����Ă��������ƃC���[�W���͂߂�Ǝv���܂��B
�܂��A�g�p��̒�����������@�T�v���������������B�����g�p��̒����͂������������B
�s���ȓ_�Ȃǂ������܂����炨�C�y�����[���ł��₢���킹���������B
�P. �C���X�g�[�����@
���������������������B
�Q. �N�����@
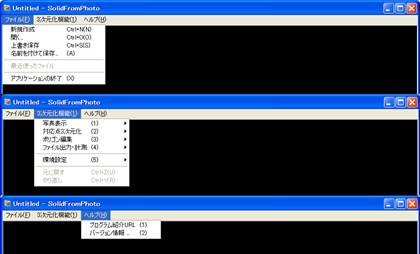
�C���X�g�[������SFP���_�u���N���b�N���܂��BV2.03�ȍ~�̏��߂Ă̋N�����Ɉȉ��̃_�C�A���O���\������܂��B�O���t�B�b�N�J�[�h��RADEON�̃p�\�R����O���t�B�b�N�J�[�h���s���ȏꍇ�́u�������v���N���b�N���Ă��������B����ȊO�̏ꍇ�́u�͂��v���N���b�N�����ق������ꂢ�ȕ\�������܂��B
����SFP�������オ��A�ȉ��̃E�C���h�E���\������܂��B
�R. ���j���[
���j���[�iV0.99�j�͈ȉ��̂悤�ɂȂ��Ă��܂��B�ʐ^��ǂݍ���A�ʐ^�̃E�C���h�E��܂���3�����E�C���h�E��ʼnE�{�^�����N���b�N�����SFP�Ɠ������j���[���\������܂��B�ڍׂ́u���j���[�̋@�\�v�Ő������܂��B
 �@
�@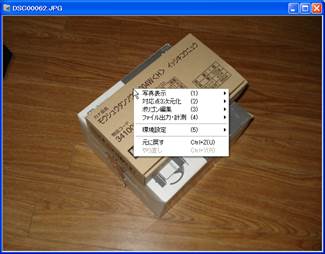
�S. �ʐ^�̓ǂݍ���
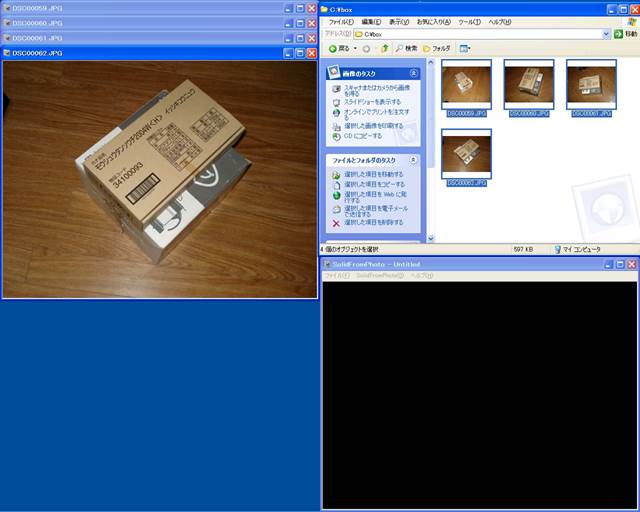
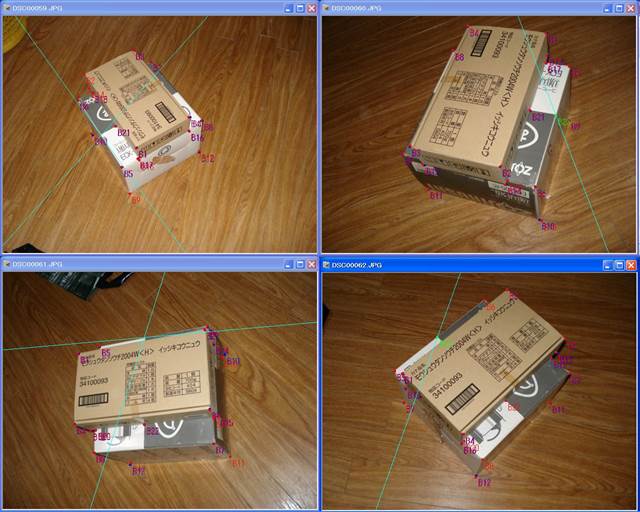
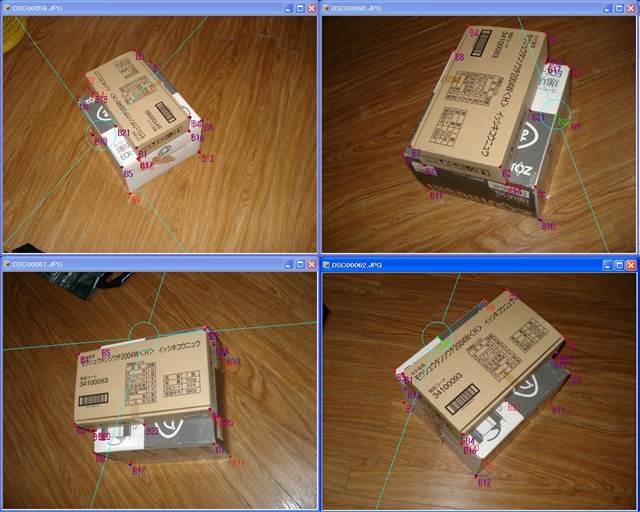
�R����������ʐ^��\�����ꂽ�E�C���h�E�Ƀh���b�O���h���b�v���܂��i�����̎ʐ^���ɂ��o���܂��j�B��������Ɖ�ʂ̍���Ɏʐ^���\������܂��B���̐}�́A�G�N�X�v���[���ŕ\�����Ă���ʐ^4������SFP�Ƀh���b�O���h���b�v��������̉�ʂł��B
�T. �Ή��_�̐ݒ�����܂��B
�i�P�j�ʐ^��\�����Ă���E�C���h�E�̈ʒu��T�C�Y��ʐ^�̕\���T�C�Y��\���ʒu��K���ɒ������A3����������`��̑S�̂�������悤�ɂ��܂��B�ʐ^�̕\���T�C�Y��\���ʒu�̕ύX���@�́u�}�E�X�̃z�B�[���̉�]�v�E�u�z�C�[���Ŏʐ^���h���b�O�v���܂��B�ڍׂ́u�}�E�X�̋@�\�v���������������B
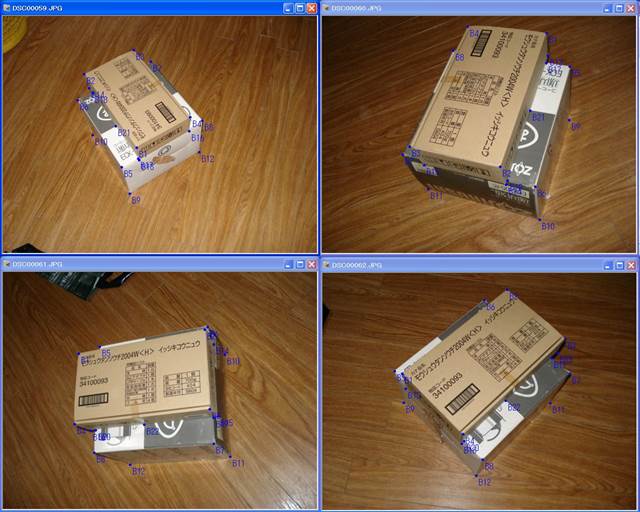
�i�Q�j���ۂ̌`��̓����I�ȉӏ����ʐ^��ŃN���b�N���܂��B�N���b�N�����ӏ��ɂ́u�̓_�v���\������A���̑���B1�ƕ\������܂��BB1��B�͑Ή��_�̑����ł��BB1�̂P�͑Ή��_�̔ԍ��ł��B�����ɂ��Ă̓��j���[�Љ�́uA�����_�\���v���������������B�u�̓_�v�͓��͓r���ł܂����肵�Ă��Ȃ��_���Ӗ����܂��B
�i�R�j�N���b�N�����_�͈ȉ��̂����ꂩ�̕��@�Œ����ł��܂��B
�@ �ēx�N���b�N����Ἠ_�͐V���ɃN���b�N�����ӏ��Ɉړ����܂��B
�A �L�[�{�[�h�̖��L�[�Ŏʐ^���1�h�b�g�P�ʂňړ����܂��B
���ʐ^�̍L���͈͂�������{���ł��܂�_�o���g�킸�Ή��_�i�̋߂��j���N���b�N���A���̌�A�ʐ^���g��\�����Ė��L�[�Ő��m�Ȉʒu�Ɉړ���������A��ƌ����������Ƃ�������܂��B
�i�S�j���}��4���̎ʐ^�Łu���v�̑��̔��̊p��4���̎ʐ^��ŃN���b�N�����}�ł��B

�i�T�j�G���^�[�L�[�������Ɓu�̓_�v�́u�̓_�v�ɕς��܂��B�u�̓_�v�͓��͂��I�������肵���_�������܂��B�G���^�[�L�[�́u3�������@�\�\�Ή��_3�������\�Ή��_�����v�̃A�N�Z�����[�^�L�[�ɂȂ��Ă��܂��B�u�Ή��_����v���N���b�N���Ă����l�ł��B�u�Ή��_����v�͓��͂��悤�Ƃ��Ă���Ή��_��S�Ă̎ʐ^�Ɂu�̓_�v�Ƃ��ē��͂��Ă���s���Ă��������B�܂��ʐ^��ʼnE�N���b�N������ƃ��j���[���\������܂��̂ŁA���̃��j���[�őI�����Ă��\���܂���B�o���͒ʏ�́u�P�i�e���L�[�ł͂Ȃ����j�v���u�Ή��_����v�̃A�N�Z�����[�^�L�[�ɂȂ��Ă��܂��B�E��Ń}�E�X�������́u�P�v�̕��������₷���Ǝv���܂��B
�@
�i�U�j�u�Ή��_3�������\����v���s�����Ή��_�͈ȉ��̎菇�Œ����ł��܂��B
�@ ����đΉ��_������s�����u�̓_�v���N���b�N���܂��B
�A �u�̓_�v���u�̓_�v�ɕς��܂��B���m�ɂ́u�̓_�v�̏�ɗ̓_�������Ă��܂��B
�B �������ʒu���N���b�N���邩���L�[�ŗ̓_���ړ����܂��B
�C ���j���[�́u�Ή��_3�������\����v���N���b�N���܂��iEnter�L�[�����ł��j�B
�i�V�j�Ή��_���ʂ��Ă��Ȃ��ʐ^��ŃN���b�N���āu�̓_�v���́u�̓_�v���o�����ꍇ�́A���̕��@�ō폜�ł��܂��B
�@ �u�̓_�v�̏ꍇ�A�폜����u�̓_�v���N���b�N���A�u�̓_�v�ɂ��܂��B
�A �u�̓_�v�̏ꍇ�A�폜����u�̓_�v���ʂ��Ă���E�C���h�E�̃^�C�g���o�[���N���b�N���āA���̃E�C���h�E���A�N�e�B�u�ɂ��܂��B
�B ���j���[�́u�Ή��_3�������|1�폜�v���N���b�N���܂��iBackSpace�����ł��j�B
�i�W�j���̊p��S�ē��l�ɓ��͂��܂��B
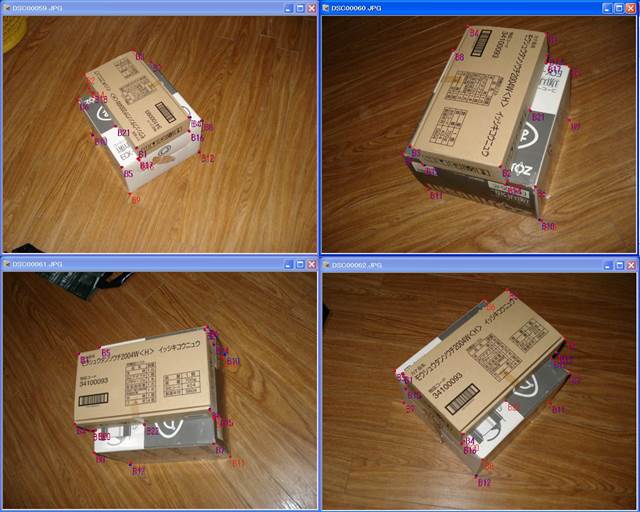
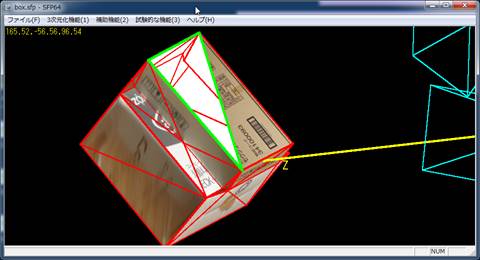
���j���[�́u3�������@�\�\�Ή��_3�������|�J�����ʒu�E�p���̌v�Z�v���N���b�N���܂��B���̏����ɂ͎��Ԃ�������ꍇ������܂��B�������I���Ɓu�Ԃ̓_�v�͕\������܂��B�\�����ꂽ�u�Ԃ̓_�v�́A�J�����ʒu��p���̌v�Z��A�Ή��_�̂R�������W���v�Z���A���̍��W���ʐ^�Ɏʂ����_�ł��B�܂�A�v���O�������v�Z�����Ή��_���ʐ^�Ɏʂ������̂ł��B���̂��߃J�����ʒu��p���̌v�Z���ʂ������x�̏ꍇ�́A���͂����Ή��_�i�̓_�j�ƌv�Z��̑Ή��_�i�Ԃ̓_�j���ɂ߂ċ߂��ɂ���܂��i���S�ɏd�Ȃ�ꍇ������܂��j�B
�u�̓_�v�Ɓu�Ԃ̓_�v���傫������Ă���ꍇ�͐������v�Z�ł��Ă��܂���B���̗��R�Ƃ��āu���͂����Ή��_�Ɍ�肪����v�A�u�Ή��_�̕��z�Ő������v�Z�ł��Ȃ��v������܂��B�u�̓_�v�Ɓu�Ԃ̓_�v���傫������Ă���ꍇ�͓��͂����Ή��_���m�F���A��������ΑΉ��_��lj����A�ēx�u�J�����ʒu��p���̌v�Z�v���s���܂��B
���}�̏ꍇ�A�������v�Z���o���Ă��܂��B�X�Ɍv�Z���ʂ̐��x��������ꍇ�̓��j���[�́u�J�����ʒu�E�p���|�J�����ʒu��p���̐��x����v���s���܂��B
�V. �Ή��_�̒lj����@�B
�@�Ή��_�̒lj����@�́A�Ή��_�̐ݒ蓯�l�Ɏʐ^��̒lj�����Ή��_���N���b�N���܂��B�u�J�����ʒu�E�p���̌v�Z�v��ɑΉ��_��lj��i�Ή��_���u�̓_�v��Ԃ̂Ƃ��j����ƁA���̎ʐ^�ɐ��F�Ő����\������܂��B�u�J�����ʒu�E�p���̌v�Z�v���������ꍇ�ɂ͑��̎ʐ^�ł̑Ή��_�͐��F�̐��㖔�͐��̂��ɂ���܂��B�����ڈ�ɂ����ƌ������ǂ��Ȃ�܂��B
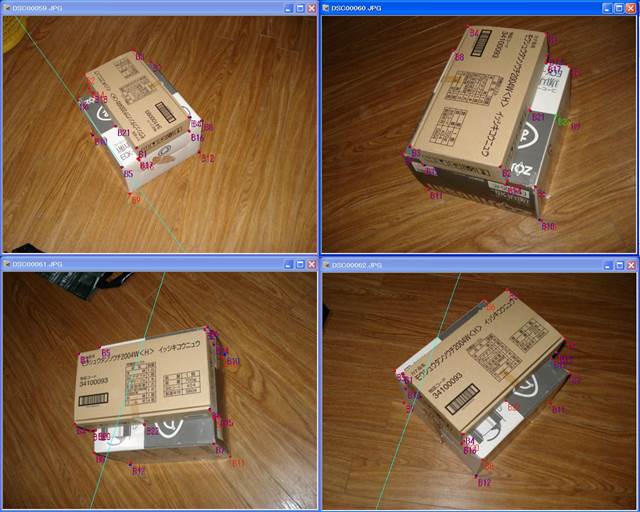
�@2���ڂ̎ʐ^��ɓ_��Ή�����_��lj�����Ɛ��F�̐��͑����܂��B
���̂��߁A�u�J�����ʒu�E�p���̌v�Z�v���������ꍇ�ɂ́A�Ή��_�͐��F�̐��̌�_�t�߂ɑ��݂��邱�ƂɂȂ�܂��B�Ή��_���N���b�N����ӏ��ɐ��F�̐����������Â炢�ꍇ�́u�ʐ^�\���|��_�����ň͂ށv���N���b�N���܂��B�ȉ��̂悤�Ɍ�_�̋߂������ň͂݁A���̒��̌�_�������܂��B
�Ή��_��lj�������K�v�ɉ����āA���j���[�́u�J�����ʒu�E�p���|�J�����ʒu��p���̌v�Z�v�܂��́u�J�����ʒu�E�p���|�J�����ʒu��p���̐��x����v���N���b�N���܂��B�Ή��_�̒lj��O�Ɂu�Ԃ̓_�v�Ɓu�̓_�v���啝�ɗ���Ă���ꍇ�́u�J�����ʒu�E�p���|�J�����ʒu��p���̌v�Z�v�A��������Ă���ꍇ�́u�J�����ʒu�E�p���|�J�����ʒu��p���̐��x����v��I�����܂��B
��̎ʐ^�̏ꍇ�͑Ή��_��lj�����O����u�J�����ʒu�E�p���̌v�Z�v���ʂ͐��x���������߁A�u�J�����ʒu�E�p���|�J�����ʒu��p���̌v�Z�v�܂��́u�J�����ʒu�E�p���|�J�����ʒu��p���̐��x����v���s���K�v�͂���܂���B
���ŏ��̑Ή��_�̐ݒ�͑Ή��_���Ԉ����Đݒ肵�A�u�J�����ʒu�E�p���|�J�����ʒu��p���̌v�Z�v��A�Ԉ������Ή��_��lj���������A��ƌ������ǂ��ꍇ������܂��B
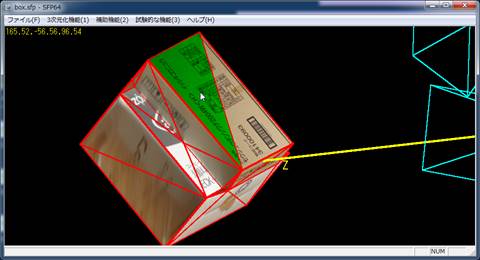
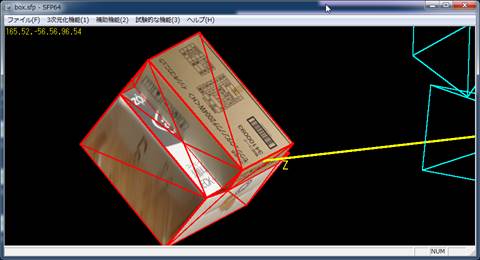
�W. �|���S���̍쐬�����܂��B
���j���[�́u3�������@�\�\���f�����O�v���|�|���S�������쐬�v���N���b�N���܂��B

�X. �쐬�����|���S�����m�F���܂��B
3�����`��̕\���̕ύX���@���}�E�X�̋@�\���������������B
�P�O. �|���S���̍쐬���ʂ��s���ȏꍇ�͈ȉ��̕��@�Œ������܂��B
�i�P�j �ύX����|���S�����N���b�N���܂��B��������ΑI������ėɂȂ�܂��B
�i�Q�jDelete�L�[�������ΑI�������|���S�����폜����܂��BDelete�L�[�̓��j���[�́u3�������@�\�|�I��v�f�̍폜�v�Ɋ���t�����Ă��܂��B
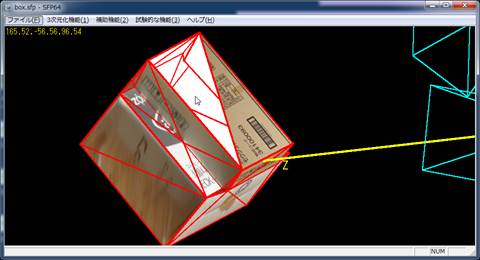
�i�R�j�|���S�����쐬����ɂ́u�Ԃ̓_�v��3�A�����v���ɃN���b�N���܂��B�I�������_�ɉ����ė̐����\������܂��B
�i�S�j���j���[�́u3�������@�\�\���f�����O�E�v���\�|���S���蓮�쐬�v�����s���܂��B�|���S�����쐬����܂��B
�P�P. ���O�����ĕۑ�
�ēxVRML�o�͂�Ή��_�̏C��������ꍇ�͖��O�����ĕۑ����܂��B�ۑ�����t�@�C���̊g���q��SFP�ł��B����ǂݍ��ނƂ��͊g���q��SFP�̃t�@�C����SFP�̃E�C���h�E�Ƀh���b�O���h���b�v����ƃt�@�C�����J���܂��B